As part of ME-400 (Special Problems for Advanced Undergraduates), I continued work on the origami worm robot. The main focus was on forward motion. All of my work can be found on this GitHub repository. I started a log to keep track of my work after my first two weeks.
Before I could continue working directly on forward motion, I needed to redesign everything except the spring. The past origami worm was attached to supports with clear tape, the string was attached with knot and a piece of tape, and the robot was actuated with two small servo motors. Attaching the spring was slow and weak. The string would slip often. The motors only had open loop control, and the motor shaft was hard to design custom pulleys for.
Clamp Spring System:
Previously, the origami spring was attached with tape to the supports. During testing, the spring would slip and was difficult to detach and reattach. A new mechanism was designed to allow quick on/off and one that would hold the spring in place well.
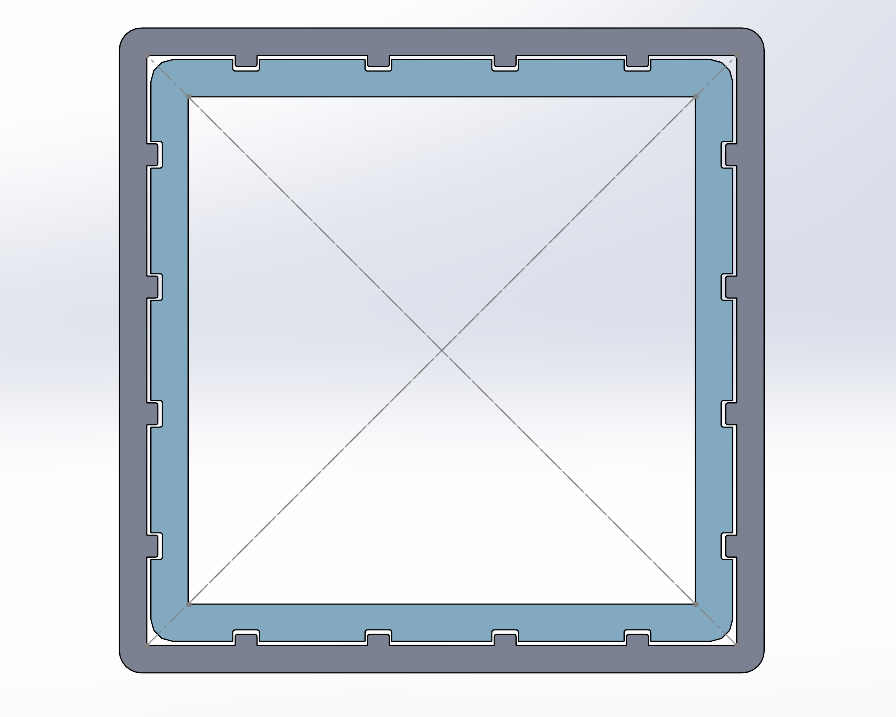
The new system was a clamp that would sandwich the spring between two plastic pieces. The clamp has edges that when fully put together will add extra resistance to coming apart.
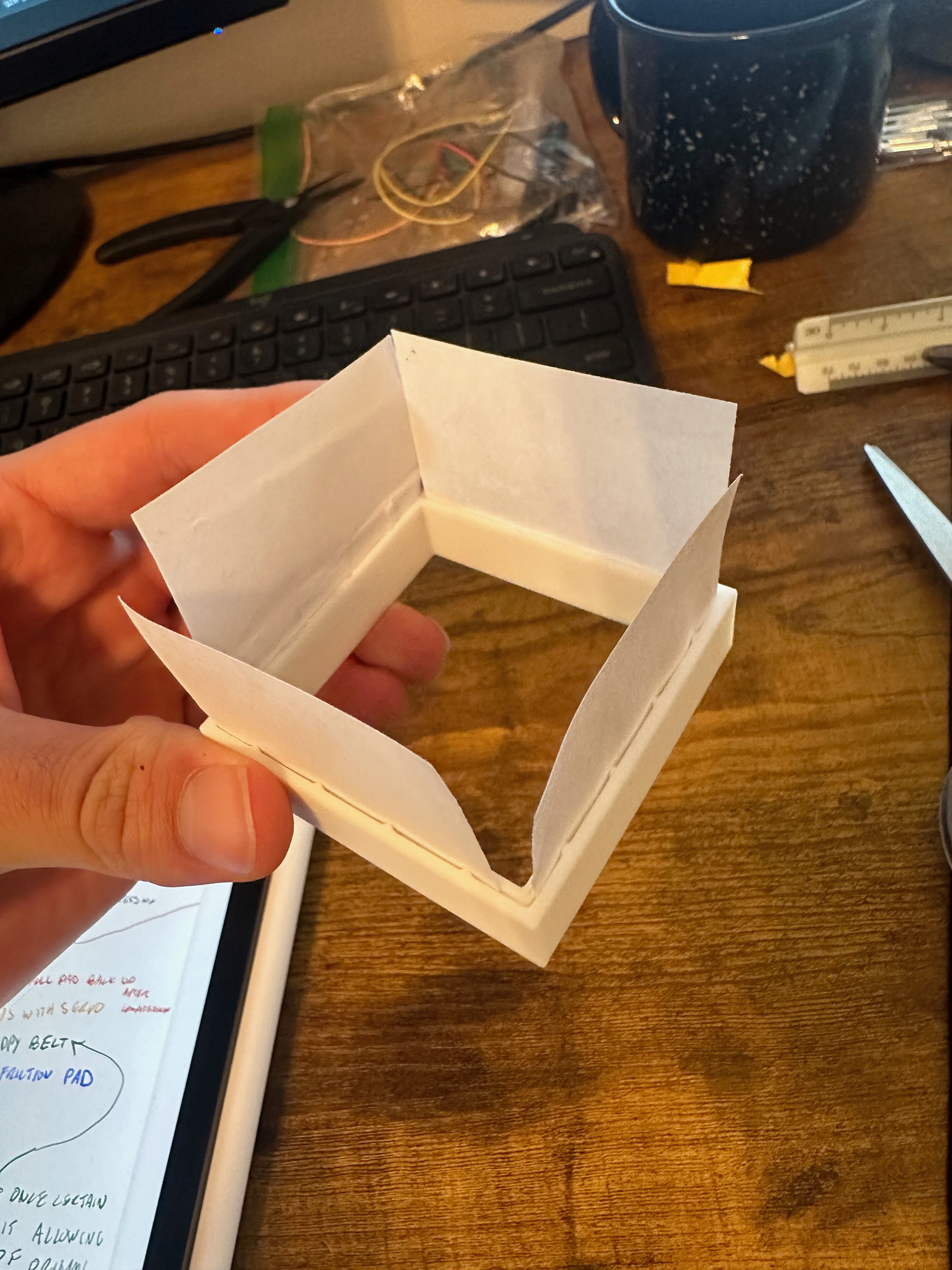
Paper Fit Test
Cross-section of Clamp System
Friction Pad Fast-mounting System:
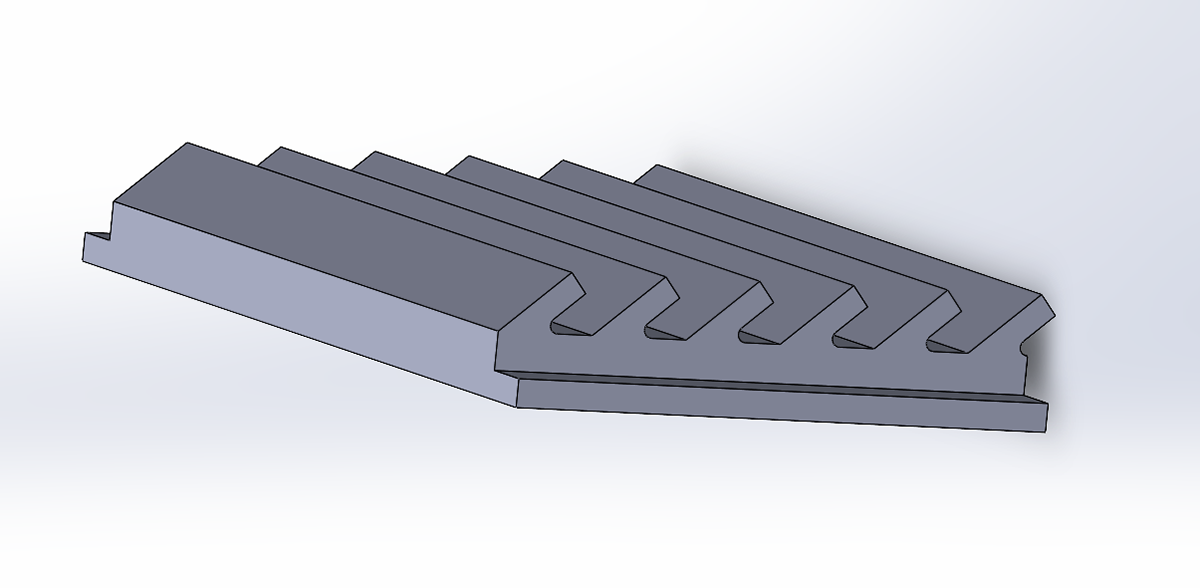
Since the new spring attachment system had an outer shell, this opened up the opportunity to add a way to attach friction pads directly. On the old system, friction pads were taped on. The new system used rails on the friction pads that would slide into a slot on the outer shell of the clamp. The rails are 1.3 mm thick, and the slot is 1.5 mm thick.
Friction Pad with Rails
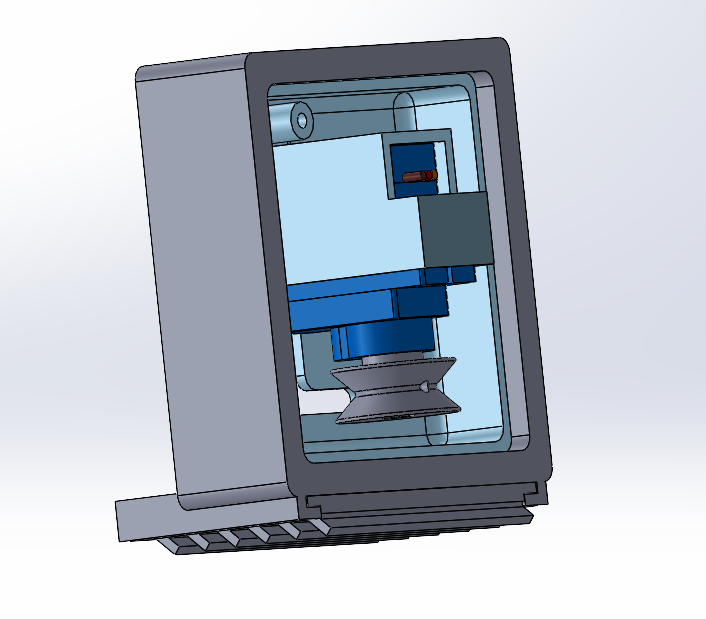
Clamp system with fast-mountain friction pad system
Servos to DC Motors:
The original design used continuous rotation servos for actuation. These were quick to implement, cheap, and in the lab. The servos were small and weak so they sometimes could not compress the asymetrical spring at the same rate. Also, they had a small plastic shaft with a star design. This made it very difficult to 3D print new parts that would couple securely.
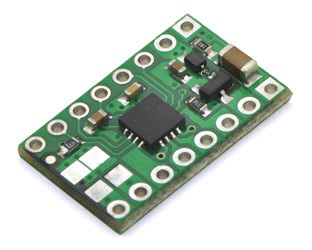
The right DC motor could solve all the problems with the servos. We needed a DC motor with an encoder that was strong enough to compress the robot completely. A quick calculation was done to estimate the maximum torque necessary to hold the robot in full compression and to compress the robot at a rate similar to the previous robot. Stiffness data was used from the previous paper.
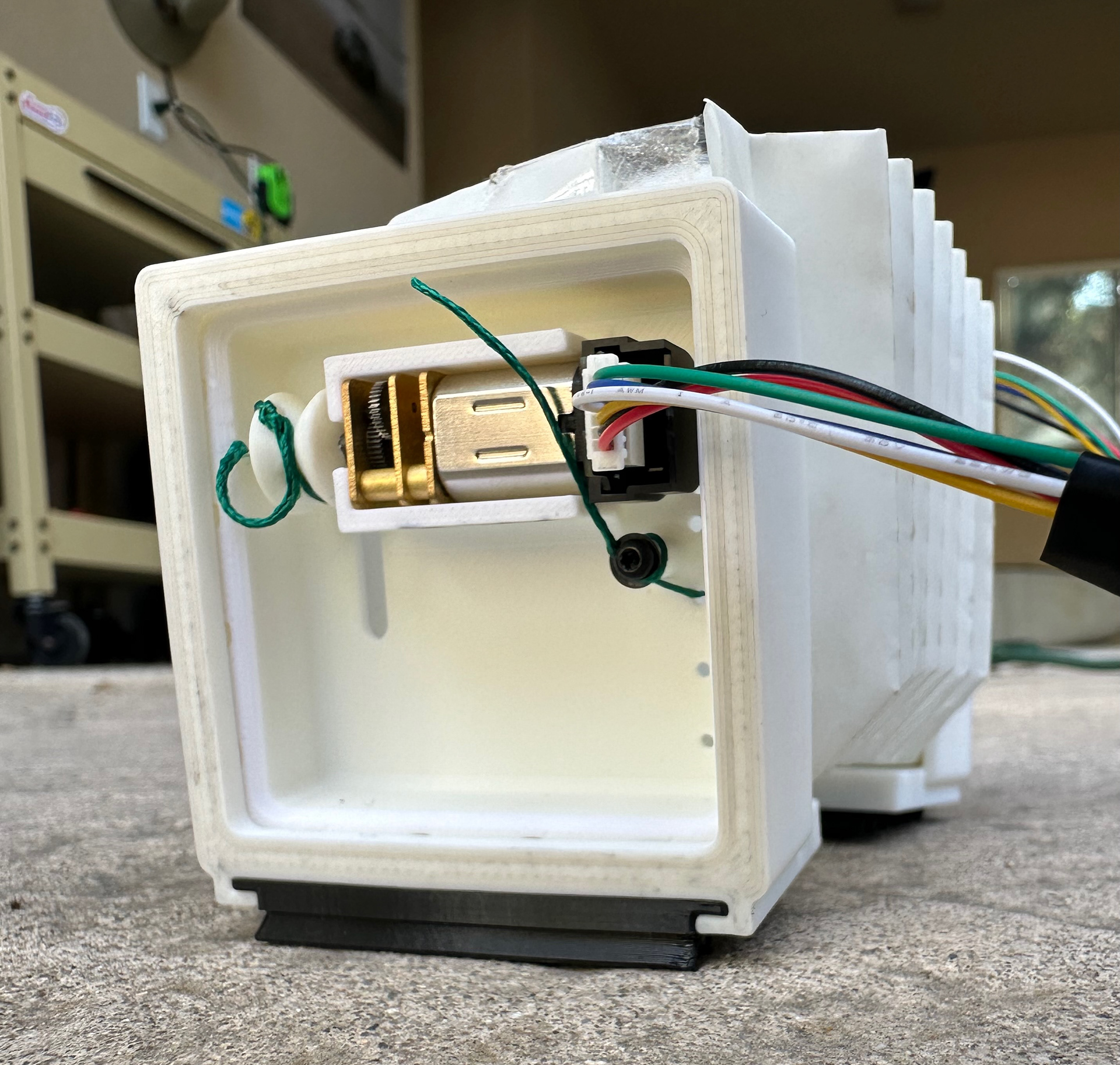
A Pololu micro-geared DC motor was selected. An option with a 298:1 gear ratio fulfilled both the torque and speed. This motor was also very small and had an encoder built-in.

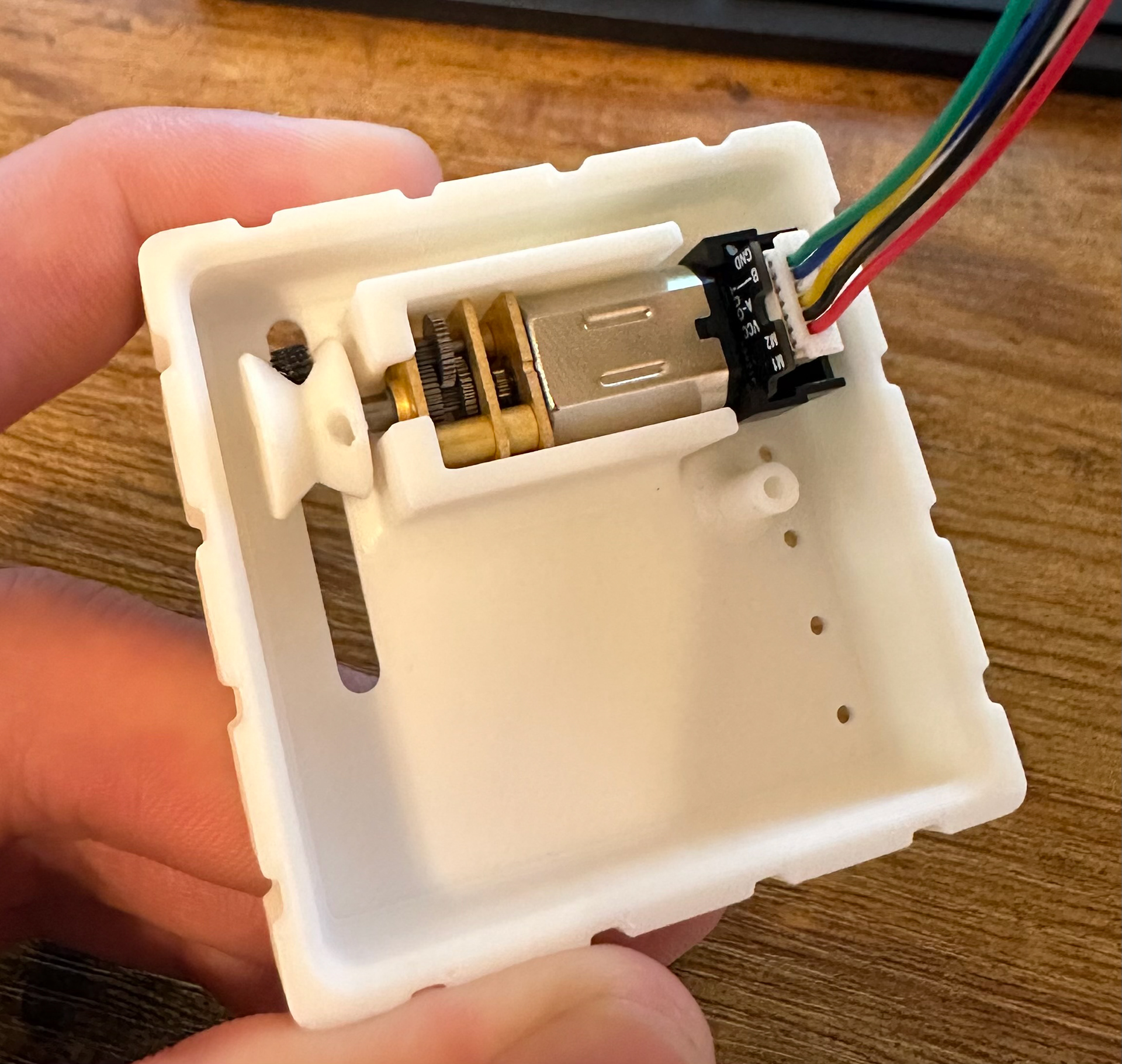
Since new motors were used, the motor mounts needed to be redesigned. The mounts were designed to be in line with the other side's connection and were to be as minimal as possible. Also, the mount features a spot for a screw to be screwed in to hold the other side of the tether. There were many different spots where the tether could be attached.
New Motor Mount Design
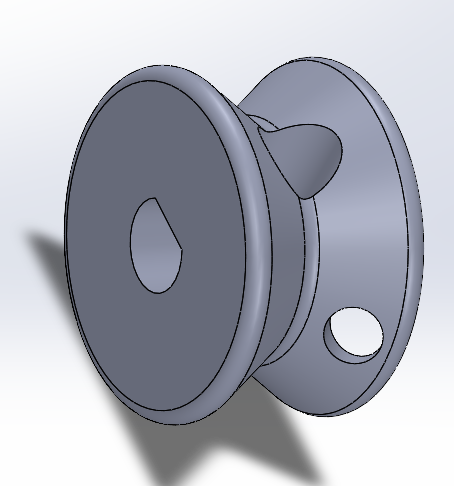
Pulleys:
Pulleys were designed to fit on the motor shafts and needed to be able to attach the tether well. The pulleys press fit tightly onto the shaft. There is a hole for a screw to lock onto the shaft but the plastic threads do not hold well enough to do anything. The pulley has a hole to tie the tether into.
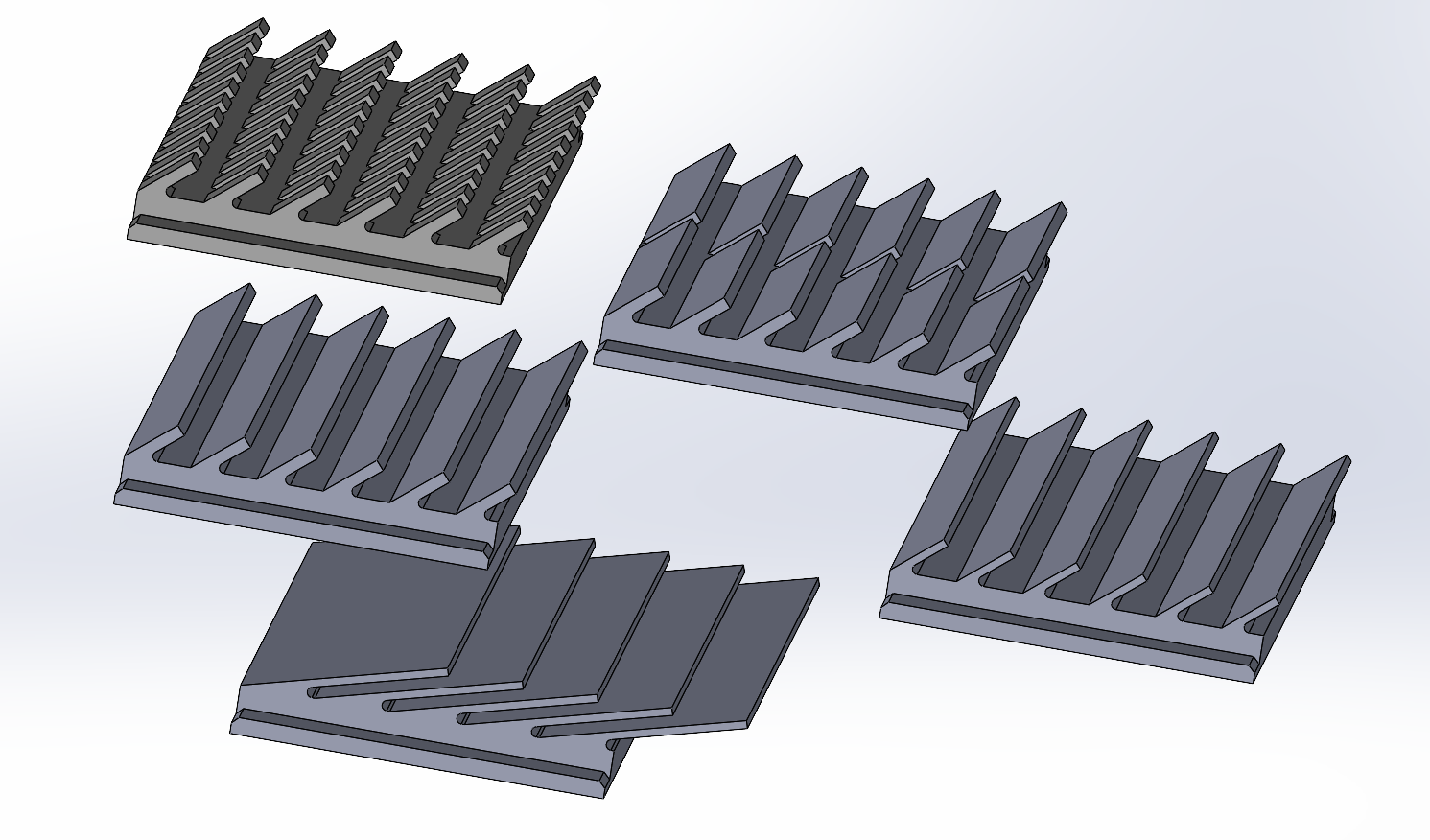
Friction Pad Design
Friction pads were designed that could be 3D printed to achieve directional friction. These were printed out of TPU. The designs all revolved around a sawtooth with differing lengths, thicknesses, and angles. This is still undergoing work to characterize what aspects of the pads affect motion, increase performance, and allow forward locomotion.
User Input:
Previously, the robot was controlled by a timed sequence. This was easy to implement but without any speed control, the motors would get out of sync and it was hard to realign them. A way to control the robot live would make the testing and movement much easier.
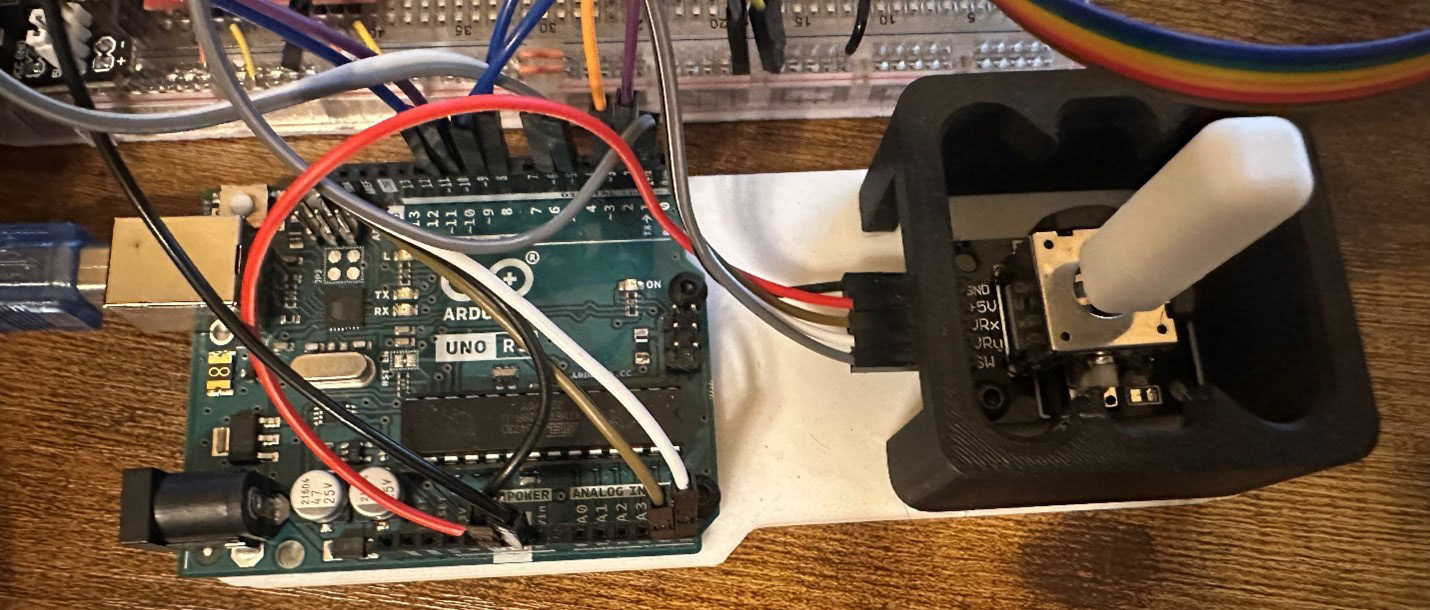
An analog joystick was used for user input. A plastic joystick was fit to the small metal joystick piece, and a housing was made to hold the joystick and Arduino side by side.
Analog Joystick

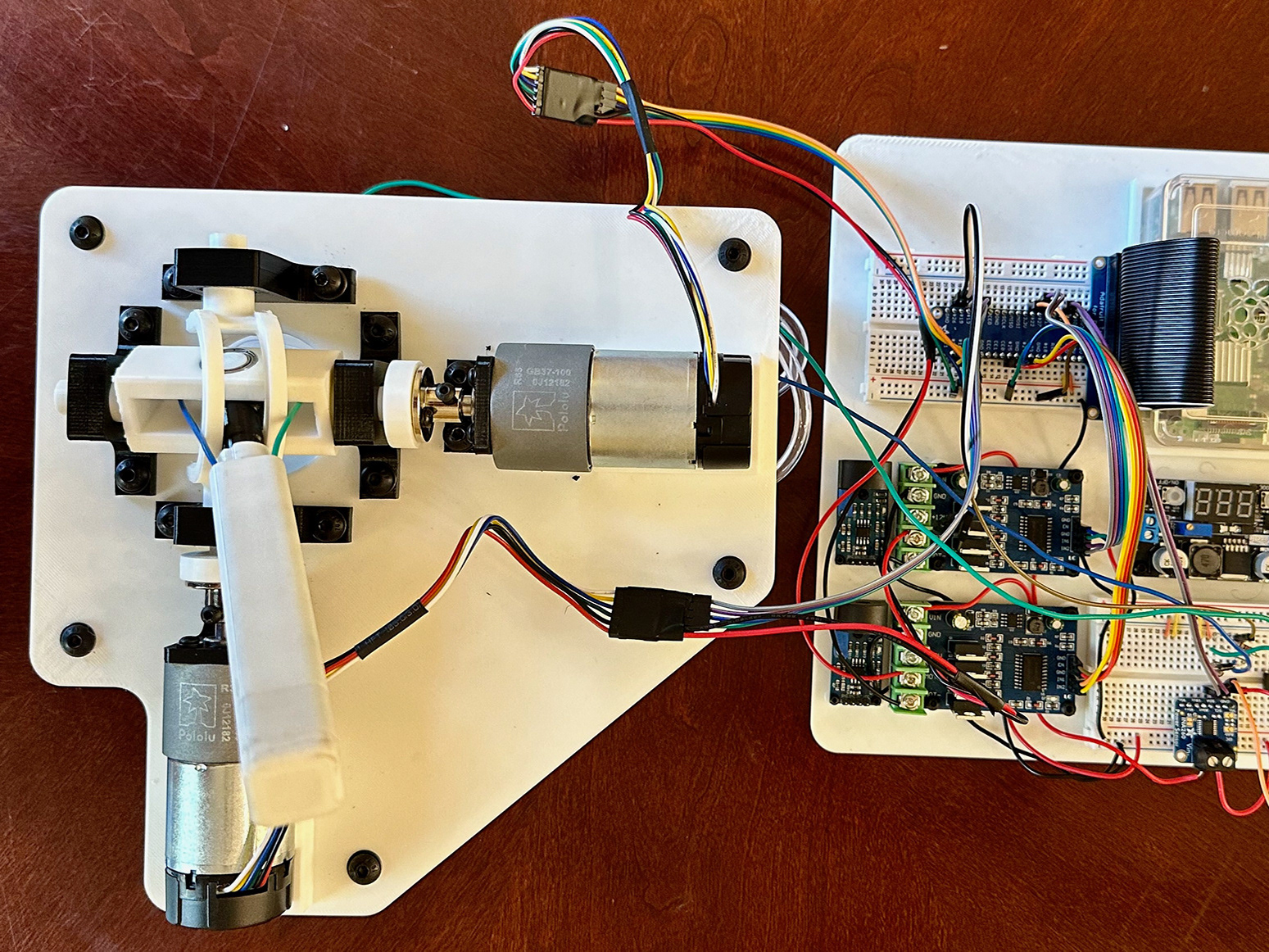
Joystick and Arduino Setup
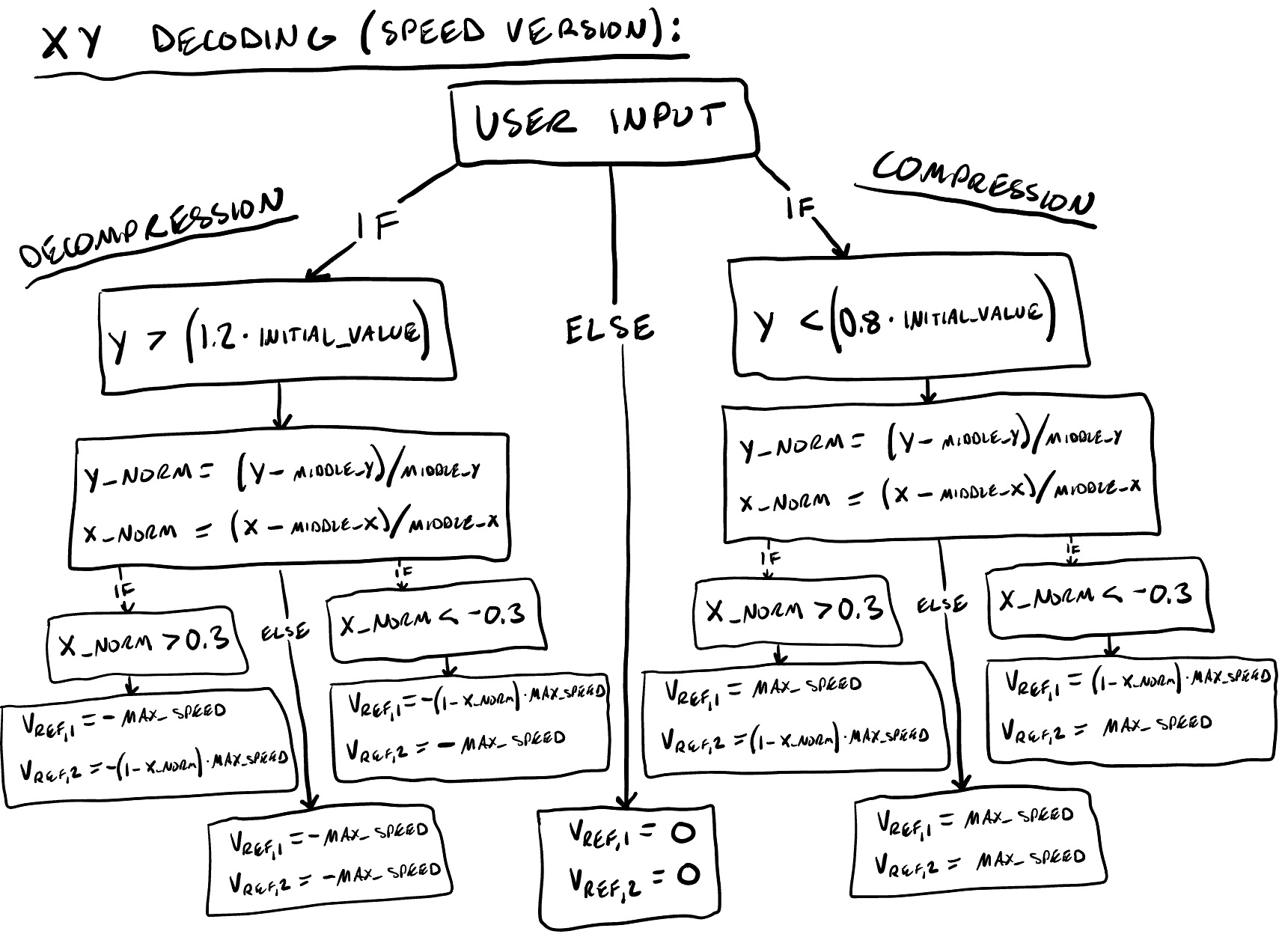
Pushing the joystick forward compresses both motors and vice versa. Pushing it to one side rotates a given motor depending on if its forwards or backwards.
Controller:
A speed-based PI controller was used to go to a specific speed based on how forward the joystick was. If the motors become off, the system corrects this until the motor's angles are realigned.

Movement Results
Once the new robot was fully working, tests could be completed using different friction pads and worm angles. This is still undergoing work. Movement is very dependent on the ground surface: roughness and angle. With all the different variables that affect the motion, it is very difficult to understand what is doing what. Sometimes the robot will work as planned, sometimes won't work at all, and sometimes will do the opposite of what is expected.
We are currently playing around with the worm angle by adjusting the tether connection point which changes the balance of moments about the center of action. This changes how the robot puts pressure into the pads. We are also trying an assortment of friction pad designs and where the pads sit relative to the mounts. Since they are friction fit into the mounts, they can be moved in and out of the mount to move the feet more or less outward.
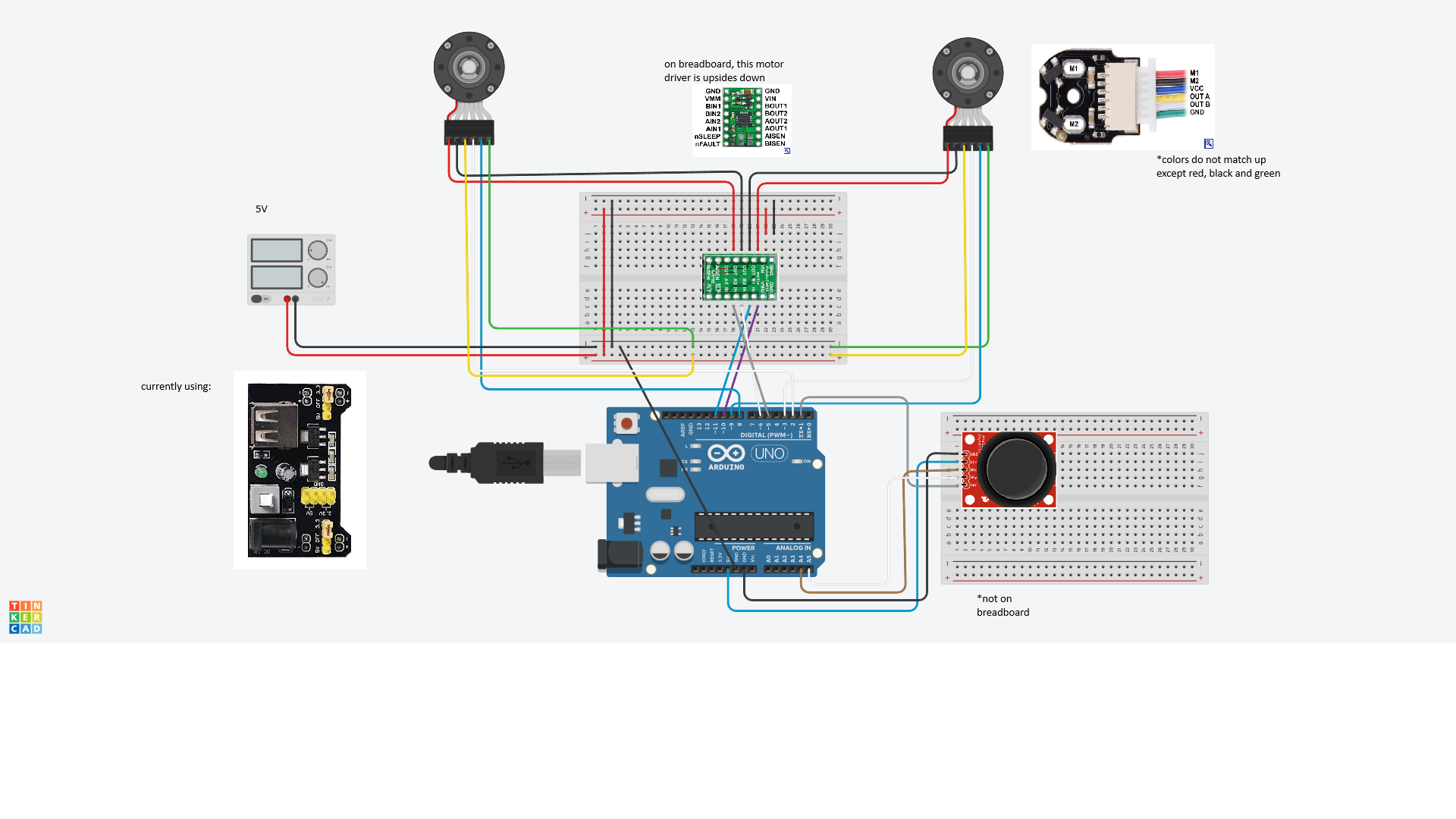
Wiring Diagram